许多软体机器人组件,包括传感器和执行器,主要是利用弹性基材内嵌入的连续纤维来实现各种功能的。然而,由于处理精确分层和将纤维保留在不一致的图案位置中的过程极为复杂,因此将连续纤维手动嵌入软基材极具挑战性。

相比之下,研究团队开发的AFE方法,可以在无需用户手动干预的情况下高精度制造复杂的层状复合材料,从而显著扩大制造可能性的范围,同时节省时间和劳动力。
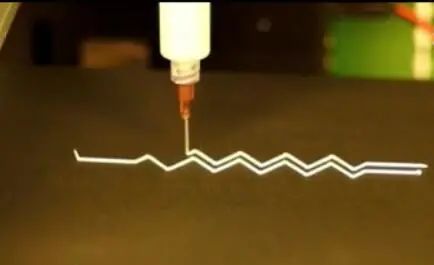
该技术通过直接墨水书写,以自动方式利用纤维嵌入与弹性体沉积的无缝组合,并精确控制复合结构内的深度和纤维间距。这种自动化过程对于软体机器人组件的制造和定制都具有极大的影响,在以前,这些组件需要手动操作,且无法轻松实现复杂的几何形状。
在研究中,研究人员讨论了在有机硅弹性体中自动分层和嵌入纤维的三种不同方法。
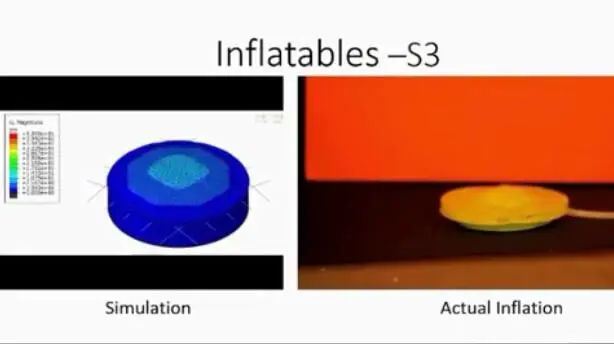
为了展示这些技术的多功能性,研究人员着重介绍了从充气执行器到感应充电线圈的几种软机器人应用。
AFE制造工艺实现了嵌入纤维图案用于控制颜色变化、调整结构和形态特性、激活热输入,并在软机器人结构中实现电特性。此外,还展示了AFE方法的组合,可用于自主制造多个软机电组件。
该技术展示了制造工艺的发展,这些工艺可用于在软复合材料中定制复杂的纤维布局。这将为软体机器人中的各种新应用创造了可能,包括软传感器和软通信设备。